Advanced Visual Localization and Topographic Mapping Empower Zhurong Rover's Mars Exploration
A recent study published in the IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing sheds light on the sophisticated visual localization and topographic mapping techniques that empower China's Zhurong rover to navigate and conduct scientific investigations on Mars. Developed by researchers from the Aerospace Information Research Institute (AIR) of the Chinese Academy of Sciences and the Beijing Aerospace Control Center (BACC), these techniques played a vital role in the success of the Tianwen-1 mission—China's first independent interplanetary exploration endeavor.
China's Tianwen-1 mission, launched in July 2020, aimed to map the Martian surface, analyze geological structures, and study the planet's climate and environment. A key component of this mission was the Zhurong rover, which landed in southern Utopia Planitia on May 22, 2021. The rover’s ability to traverse the Martian terrain and carry out in-situ scientific investigations depended heavily on accurate localization and high-resolution topographic mapping.
The study details several innovations that enhanced Zhurong’s navigation system, including vignette correction and online camera mast calibration techniques, which enhanced the quality of images captured by the rover's Navigation and Terrain Cameras. These improvements allowed for the generation of high-resolution 3D topographic maps with centimeter-level accuracy. Such maps were critical for obstacle analysis and rover path planning.
Accurate localization was critical for safe and effective surface operations. By integrating cross-site visual localization and digital orthophoto map (DOM) matching, researchers were able to refine the rover's position with an accuracy of 0.50% relative to the traverse length, far surpassing the 3.11%. accuracy of the rover's onboard dead-reckoning system.
The study reported that Zhurong traveled a total distance of 2009 meters, 88 meters more than recorded by the onboard odometer (1,921 meters). This discrepancy was attributed to wheel slippage caused by the downslope trend of the traverse, highlighting the importance of accurate localization in understanding the rover's movement on Mars.
The advanced visual localization and topographic mapping techniques were routinely used by BACC during mission operations and contributed significantly to the mission's scientific outcomes. High-resolution topographic maps enabled detailed analysis of geological features, such as Transverse Aeolian Ridges (TARs) and impact craters, offering valuable insights into Mars’ geological history and climatic evolution.
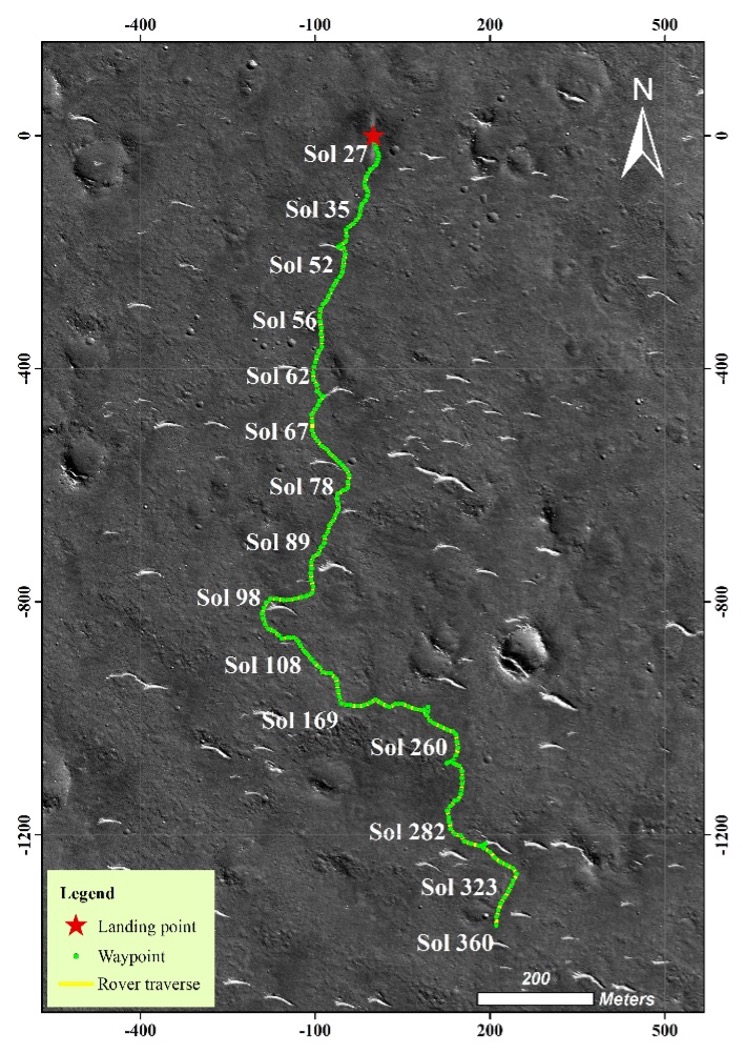
The traverse of Zhurong rover generated from visual localization. (Image by AIR)
News & Events