New Scientific Results of Topographic Analysis and Mineral Retrieval from Chang’e-4 Data
The Planetary Remote Sensing team of State Key Laboratory of Remote Sensing Science, the Aerospace Information Research Institute (AIR) under the Chinese Academy of Sciences (CAS), has long been engaged in developing advanced technologies of lunar rover localization and surface environment perception for the Chang’e-4 lunar exploration mission, which achieved first far-side landing in Von Kármán crater on 3 January 2019. The technologies and software have been routinely used in the Chang’e-4 mission and contributed greatly to lander localization, 3D terrain reconstruction, hazard recognition, visual localization of the rover, and etc.
In addition to participation of engineering operations, the Planetary Remote Sensing team, in collaboration with other teams, also performs scientific studies on topographic evolution analysis and surface mineral retrieval using images and spectral data acquired by the Yutu-2 rover. A series of recent research results are briefly summarized below.
Detailed topographic analysis of the landing site was performed using a rover-image-derived 5cm grid spacing digital elevation model (DEM), existing orbital-data-derived DEMs, and numerical simulations. The results reveal the topographic evolution of the SPA and demonstrate that the surface material explored by the Yutu-2 rover is lunar deep interior material excavated from Finsen crater with possible contributions from Alder crater rather than the underlying mare basalt. (Di et al., 2019).
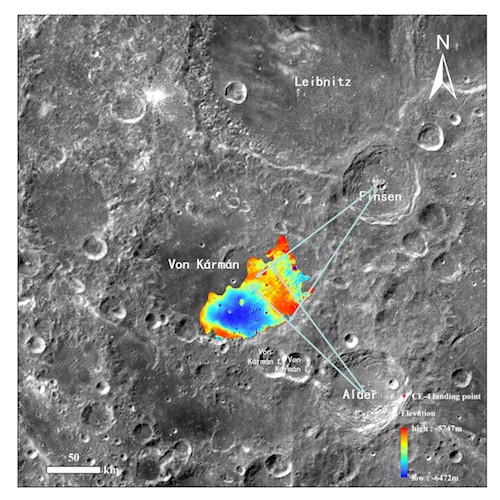
Context map of Chang’e-4 landing site showing ejecta from Finsen and Alder craters.
Spectral parameter scatter plots of in situ measured spectra by Chang’e-4 rover are in favor of a mixture of olivine-orthopyroxene minerals in the regolith. According to the surrounding topographic and geologic context, the regolith at Chang'e-4 landing site is primarily the weathering products of lunar deep-seated materials excavated from Finsen crater (Gou et al., 2019). Further analysis via spectral unmixing reveals that the regolith has a forsteritic olivine and magnesium-rich orthopyroxene assemblage in almost equal fractions. The regolith likely originated from a differentiated SPA impact melt pool or from an Mg-suite pluton in the lunar lower crust (Gou et al., 2020a). Spectral simulation reveals that the regolith is mature after billions of years' space weathering. Compared with the sub-mature regolith at Chang’e-3 landing site, the submicroscopic metallic iron abundance in the regolith at Chang’e-4 landing site does not vary significantly with distance from the lander, which may be caused by the relative high regolith growth rate that had sufficiently mixed the uppermost, finest, and highly mature particles (Gou et al., 2020b).
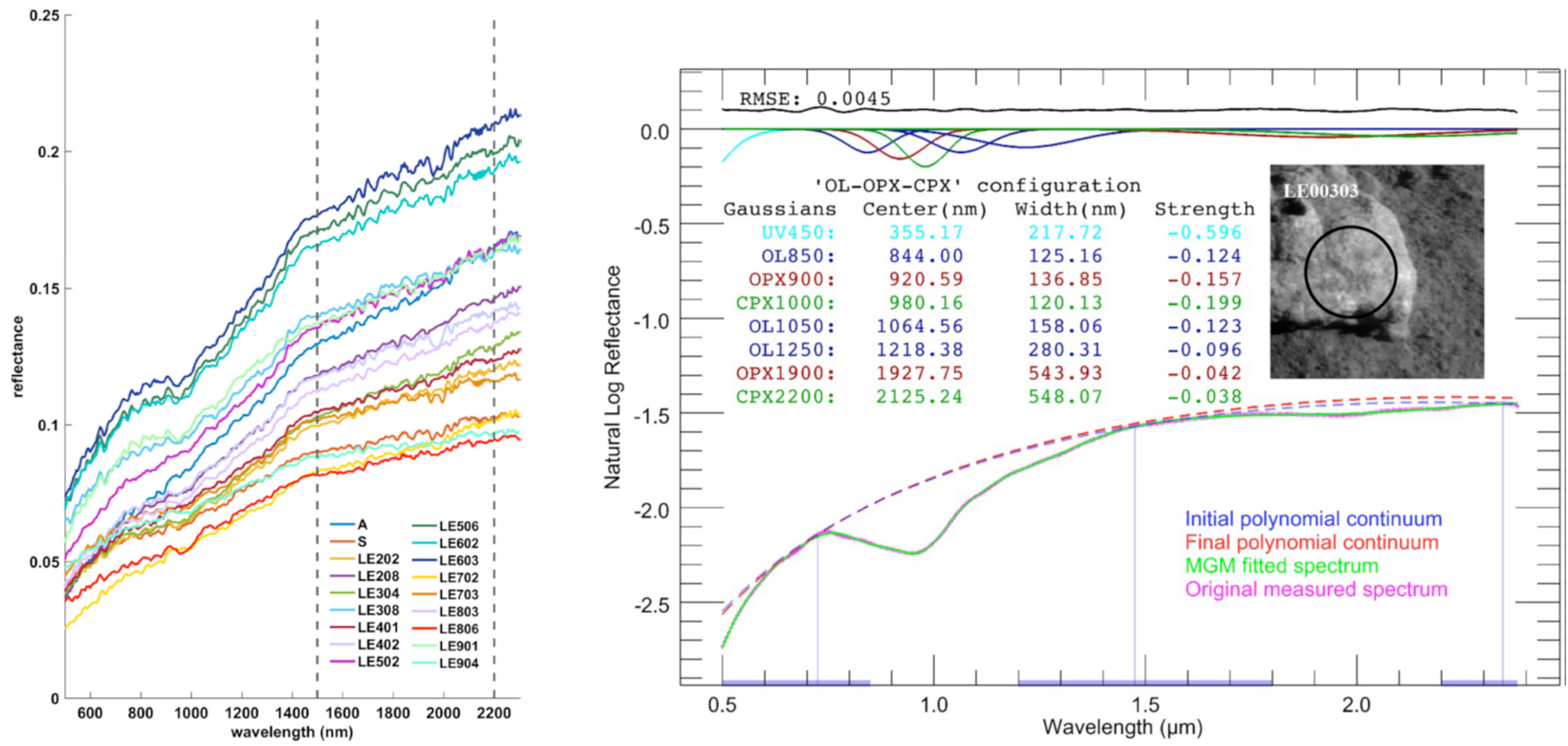
Spectra of the lunar regolith measured by Yutu-2 rover in the first 9 lunar days (left), and a typical spectral unmixing result of a rock’s spectrum (right).
High precision landing site topographic mapping have been performed using orbital, descent and rover images in the Chang’e-4 mission, resulting in DEMs and digital orthophoto maps of meter-level to centimeter-level resolutions. These mapping products directly supported surface operations of the rover and various scientific investigations of the landing site (Liu et al., 2020; Wang et al., 2020)
Published papers:
Di, K., Zhu, M., Yue, Z., Lin, Y., Wan, W., Liu, Z., Gou, S., Liu, B., Peng, M., Wang, Y., Niu, S., Zhang, J., Li, J., Xie, J., Xi, L., Yang, J., Xue, B., 2019. Topographic Evolution of Von Kármán Crater Revealed by the Lunar Rover Yutu-2. Geophysical Research Letters, 46, 12764-12770.
Gou, S., Di, K., Yue, Z., Liu, Z., He, Z., Xu, R., Lin, H., Liu, B., Peng, M., Wan, W., Wang, Y., Liu, J., 2019. Lunar deep materials observed by Chang’e-4 rover. Earth and Planetary Science Letters, 528, 115829.
Gou, S., Di, K., Yue, Z., Liu, Z., He, Z., Xu, R., Liu, B., Peng, M., Wan, W., Wang, Y., Liu, J., 2020a. Forsteritic olivine and magnesium-rich orthopyroxene materials measured by Chang’e-4 rover. Icarus, 345, 113776.
Gou, S., Yue, Z., Di, K., Wan, W., Liu, Z., Liu, B., Peng, M., Wang, Y., He, Z., Xu, R., 2020b. In situ spectral measurements of space weathering by Chang’e-4 rover. Earth and Planetary Science Letters, 535, 116117.
Liu, Z., Di, K., Li, J., Xie, J., Cui, X., Xi, L., Wan, W., Peng, M., Liu, B., Wang, Y., Gou, S., Yue, Z., Yu, T., Li, L., Wang, J., Liu, C., Xin, X., Jia, M., Bo, Z., Liu, J., Wang, R., Niu, S., Zhang, K., You, Y., Liu, B., Liu, J., 2020. Landing site topographic mapping and rover localization for Chang’e-4 mission. Science China Information Sciences, 63, 170-181.
Wang, Y., Wan, W., Gou, S., Peng, M., Liu, Z., Di, K., Li, L., Yu, T., Wang, J., Cheng, X., 2020. Vision-Based Decision Support for Rover Path Planning in the Chang’e-4 Mission. Remote Sensing, 12, 624.
News & Events